
PRODUCT CENTER
产品中心

- 产品描述
- 产品参数
- 参考资料下载
-
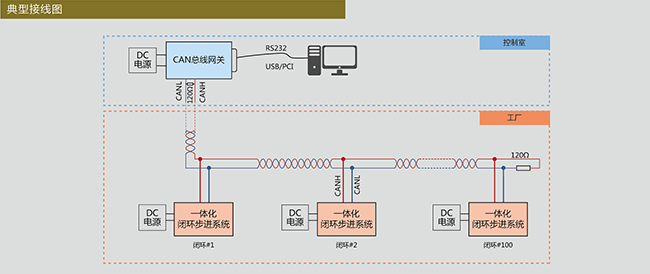
UIM242IE系列 CAN总线通讯闭环一体化步进伺服系统
UIM242IE系列是使用CAN总线通讯的微型一体化闭环步进伺服系统。CAN总线通讯具备高速长距离抗干扰等优点。配备CAN总线网关后,用户可使用指令转成CAN协议指令来高速长距离控制UIM24202IE/04IE/08IE闭环步进。用户机只需一个转换器,就可同时控制*多100台闭环步进伺服。指令结构简单, 高容错。用户无需了解步进电机驱动或CAN的知识。UIM24202IE/04IE/08IE能在0.25秒内将电机从0加速到4000转/分(基于1.8度电机)。运动控制器内置高性能DSP嵌入式微处理系统,具备运动控制和实时状态变化通知功能,全部控制循环1毫秒内完成。一体化闭环步进伺服外壳为全铝合金铸件,坚固耐用,散热性能好。 可提供NEMA 17型马达、NEMA 23型马达、NEMA 34型马达一体化闭环步进,马达的长度规格可选。
步进电机端口:
端口
说明
A+/A-
步进电机的A相接线
B+/B-
步进电机的B相接线
接线端口:
端口
符号
说明
1
V+
工作电压正极,电压:12-48VDC(注: 242Lxx/242Cxx/242Hxx的*高电压不同)
2
GND
工作电压地线,即0V (工作电压正负极不可接错)
3
CANH
CAN总线的高位线
4
CANL
CAN总线的低位线
5
AG
传感器输入的模拟地
6
S1
传感器信号输入1
7
S2
传感器信号输入2
8
S3
传感器信号输入3
9
P4
TTL电平信号输出
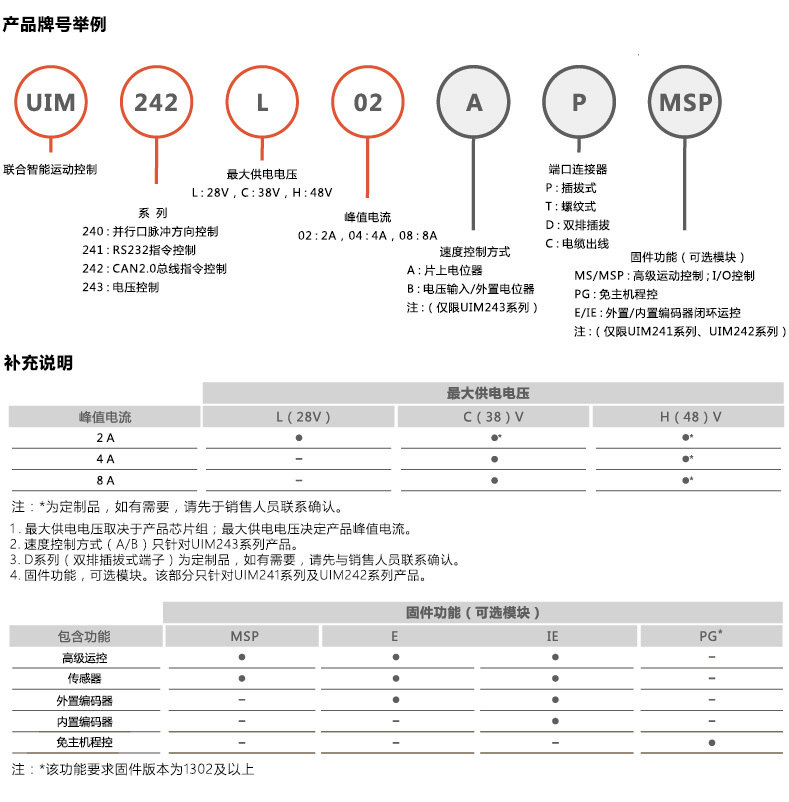
产品型号说明:
注:如需产品外观模型及产品使用说明等资料,请在下方填写并提交正确的联系方式,客服会将相关资料反馈给您,谢谢!
-
- 产品特征:
嵌入式微处理机
- 高性能64位计算精度硬件DSP(数字信号处理)嵌入式微处理器系统
- 绝对位置记录/反馈,可指令或传感器复位
- 高精度编码器,自闭环控制
- 高级运动控制模块,线性/非线性加减速,S-曲线位移,PT/PVT位置控制
- 3个传感器输入端口,包含2个12位模拟量输入端口, 可选1个使用
- 10种控制事件实时状态变化通知
- 1TTL电平输出端口,由3种事件或指令控制
- 8种传感器事件触发13种预设实施控制动作
- 指令丰富,结构简单直观
- 智能控制,高容错,傻瓜型用户界面
编码器
- 正交编码器
- 编码器分辨率多种可选
电机驱动特性
- 宽电压输入12–48VDC
- 电流输出2A/4A/8A可调相电流,指令调整
- 微步1-16细分,H桥双极恒流,在线可控脱机/使能
- 细分和电流控制准确
CAN2.0B通讯特性
- 主动CAN2.0B,全网仅2根导线
- *高1Mbps,*远10KM通讯距离
产品特征
- 高定位精度,多种控制模式
- 高速,高响应
- 驱控一体结构紧凑,大力矩
- 节能高效, 平滑低噪音
-
- 外观尺寸:
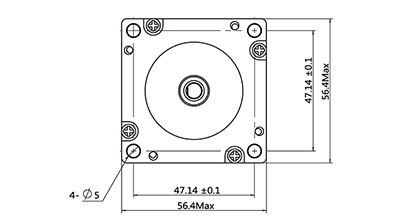
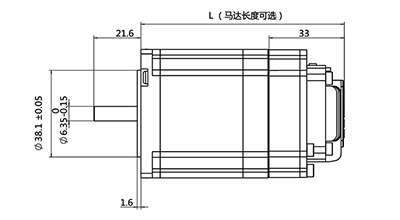
参考图纸:
相关产品
上一页
UIM2842IE系列 一体化闭环步进伺服系统
ONLINE MESSAGE
在线留言
*注:请务必信息填写准确,并保持通讯畅通,我们会尽快与你取得联系


BETVLCTOR伟德唯一官网
Shanghai United Intelligence Robotics Inc.
产品咨询: sales@uirobot.com
其他业务: info@uirobot.com
销售热线:021-61182432-8071
邮寄地址:上海市浦东新区天雄路199号纳诺产业园C区2层
一 子公司 一
BETVLCTOR伟德唯一官网(浙江)有限公司
United Intelligence Robotics (Zhejiang) Co.,Ltd
电子邮箱: sales@uirobot-zj.com
业务咨询: support@uirobot-zj.com
销售热线:0086-0573-85235952
万维网址: www.uirobot.com
邮寄地址: 中国浙江省嘉兴市平湖市智创园 B3栋

扫码手机查看